
当核潜艇在水下航行时,基本上是不跟外界保持通信的,原因主要有两点,首先是技术上的问题,电磁波在水中传递时,能量衰减很严重,所以,陆地上常用的各种利用电磁波的通信手段在水中是行不通的,同时,现阶段如何实现潜艇在水中远距离的可靠通信仍然是一个需要解决的问题,远洋的潜艇想要和岸基通信需要上浮;其次就是出于对潜艇自身隐蔽性的考虑,毕竟隐蔽性对于潜艇来说是最重要的(尤其是SSBN,即战略导弹核潜艇),茫茫的大洋就是潜艇最佳的隐蔽场所,所以为了保证自己的位置不会被暴露,是需要暂时中断和外界的无线电通信的(可接收信息,但不能发出信息,也就是大家平时听到的“无线电静默”)。

而在这种情况下,那些常见的GPS导航、无线电导航等手段对于长时间在水下航行的潜艇来说就用不上了,所以潜艇想要在水下导航就必须依靠自身的设备,这个“设备”也就是惯性导航系统(INS),惯性导航是军事领域里应用非常广泛的一种无源自主导航手段,它可以在完全不依赖外部的电、磁、声、光等信息反馈的情况下,确定自己当前的实时位置,所以,惯性导航不仅仅在潜艇上有使用,对于其他的武器装备,比如飞机、弹道导弹等,惯性导航仍然是其中常用的核心导航手段之一,像现在各核大国的洲际导弹就是有用惯性导航的。
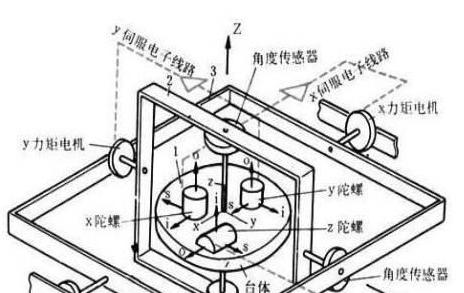
那么什么是惯性导航系统呢?简单说一下,惯性导航系统上有两个核心设备,分别是运动传感器(即加速度计)和旋转传感器(即陀螺仪),有了这两个东西,里面的计算机就可以在不依靠外部移动物体的参考下,测得潜艇当前的航向、速度、加速度方向等参数,再通过连续地航位推算后就可以得到潜艇的当前位置,比如惯性测量单元(IMU)中的3个正交速率陀螺仪和3个正交加速度计,作用就是分别测量潜艇在航行过程中的角速度和线性加速度,再把这些数据通过积分计算后才能得到相关的位置参数,当然,对于潜艇上的整个惯性导航系统来说,为了保证更好的导航精度,还会有磁传感器、速度测量仪、水压深度传感器等设备的辅助,然后再看下图,是一个惯性导航系统的工作流程图:
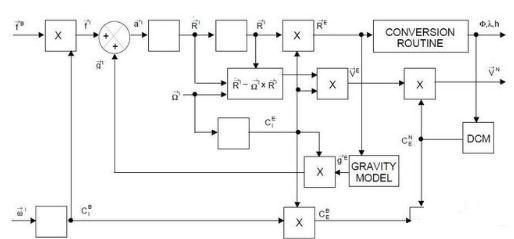
在上面的流程图中,f是比力,ω是角速度,a是加速度,R是位置,V是速度,Ω是地球的角速度,g是重力,Φ、λ和h是NED位置(北、东、下位置坐标)参数,以及,有E、I和B三个字母作为上标/下标的参数则是分别表示以地球为中心,惯性或自身参考系中的变量,而C则是是参考系的变换参数。不过,对于所有的惯性导航系统来说,误差都是不可避免的,因为在计算过程中,都会受到积分漂移的影响,即:加速度和角速度测量中的小误差,在每一次的积分计算中,都会被逐渐累积,从而使这些小误差会累积成更大的位置误差。同时,因为新位置的计算是根据先前计算的位置以及测得的加速度和角速度数据计算得出的,所以这些误差与输入初始位置以来的时间在大致上是成比例地累积。简单来说就是时间越长,误差越大,即使是标准误差为10 micro-g的顶级加速度计,也会在17分钟内累积大概50米的误差。
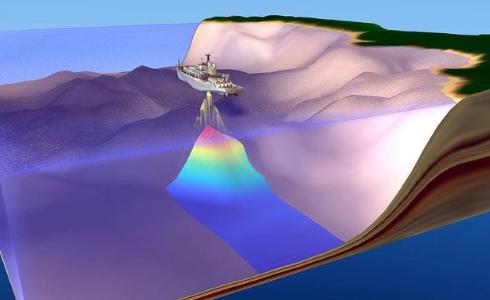
因此,为了保证在导航精度,潜艇除了惯性导航之外,还需要额外的辅助手段,比如每个一段时间就上浮水面,通过GPS定位后修正当前的位置参数,当然,这种通过上浮水面来修正位置参数的方法在只有在和平时期才能使用,如果是战争时期采用这种手段,是很容易暴露自己的位置的,所以,在这种情况下,海底轮廓信息导航就是一种有效的手段,所谓的海底轮廓导航,就是在提前对那些海床地形变化明显的区域进行详细的水文数据收集,绘制成海图后存储于潜艇的数据库中,然后潜艇在航行过程中通过声呐探测手段对当前位置的海底进行回声探测,测得海底轮廓数据后再与海图中的信息进行比较,从而得出当前的位置信息,修正惯性导航过程中带来的误差。
以上这些,就是目前潜艇导航中常见的手段,不过最后那个海底轮廓信息导航,有个前提是必须对水文数据有详细的记录,需要建立一个庞大的水文数据库,所以,为什么美国的军舰全世界到处跑你以为是闹着玩的?搞不好老美就是在收集当地的水文信息,而在水文信息采集这一方面,美国确实是做的做好的,这个没办法,谁叫人家的才是真正的蓝水海军呢?


